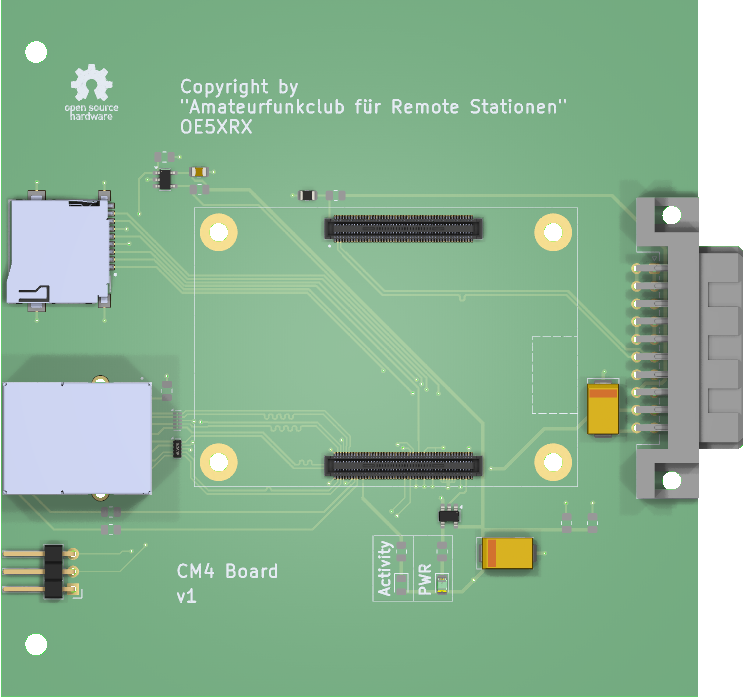
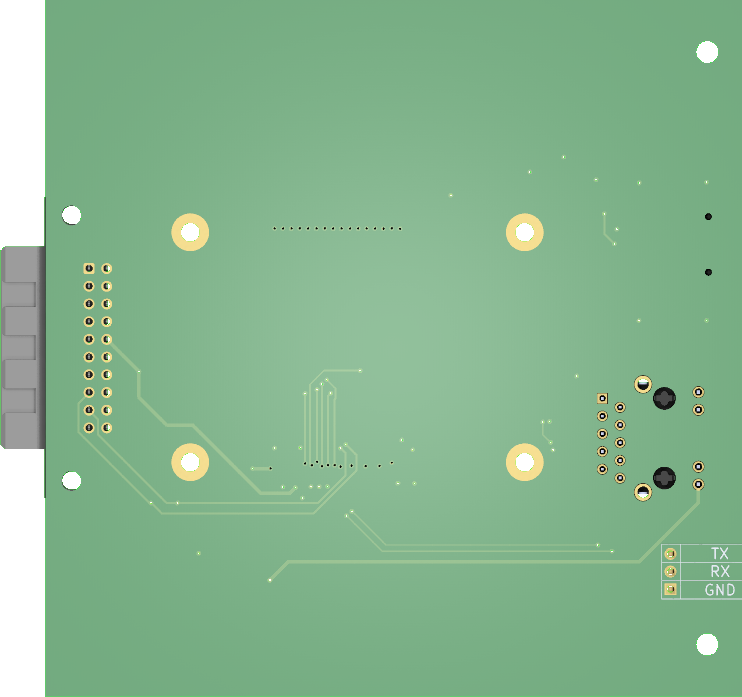
CM4 Carrier PCB
| Top | Bottom |
|---|---|
 |  |
Übersicht
Trägerplatine für das Raspberry Pi Compute Module 4 (CM4). Das CM4 steckt über zwei 100-Pin Hirose-DF40C-Connectoren auf dem Carrier und bringt CPU, RAM, optional eMMC sowie Schnittstellen (Ethernet, USB, I²C, UART, GPIO) mit. Der Carrier macht die genutzten Schnittstellen physisch zugänglich:
- Ethernet (Gigabit) — RJ45 mit integrierten Magnetics (HR911130A) für LAN-Anbindung.
- microSD — Boot-Medium für eMMC-less CM4-Varianten („lite”) sowie Test-/Entwicklungs-Builds.
- USB-Host — über den Bus-Stecker zum BusBoard → FE1.1s-Hub → 4 Modul-Slots.
- I²C — über den Bus-Stecker zum PowerBoard (Lesen der INA226-Messwerte).
- UART-Debug — 3-Pin-Header
J102direkt für seriellen Konsolen-Zugriff (siehe „Debug-Header” unten). - rpiboot — Flash-Pin (
nRPIBOOT) ist auf den Bus-Stecker geführt; wird im DeviceTester per manuell gesetztem Jumper am 4-Pin Flash-Header (J202) auf GND gezogen, um den CM4 in den Flash-Modus zu versetzen.
Block-Diagramm
flowchart LR
CM4["CM4<br/>(2× DF40C-100DS)"]
CM4 <-->|"MDI (4× TRD)"| ESDeth["TPD4EUSB30 ×2<br/>(MDI ESD)"]
ESDeth <--> RJ45["HR911130A<br/>RJ45 + Magnetics"]
CM4 <-->|"SD bus"| SD["microSD<br/>(TF-01A)"]
CM4 -->|"SD_PWR_ON"| LS["RT9742<br/>Load-Switch"]
LS -->|"+3V3 gated"| SD
CM4 -->|"LED_nPWR"| Buf["SN74LV1T34<br/>Buffer"]
Buf --> LEDp["Power-LED D202"]
CM4 -->|"LED_nACTIVITY"| LEDa["Activity-LED D201"]
CM4 -->|"USB D+/D-, USB_ID, I²C, nRPIBOOT"| Bus["Bus-Stecker J101"]
UART(["UART RXD0 / TXD0"]) <--> CM4
UART --> J102["J102 Debug-Header"]
Bus -.->|"USB Host"| BB["BusBoard → FE1.1s → 4 Slots"]
Bus -.->|"I²C (SDA/SCL)"| PB["PowerBoard (INA226)"]
Bus -.->|"nRPIBOOT"| DT["DeviceTester (zum Flashen)"]
CM4-Varianten-Kompatibilität
| Variante | Unterstützt | Zweck |
|---|---|---|
| eMMC (alle RAM-Größen) | ✅ | Produktiv-Betrieb — Boot vom internen eMMC |
| eMMC-less / „lite” (alle RAM-Größen) | ✅ | Test/Entwicklung — Boot von microSD |
| Wifi-Variante | ❌ | nicht vorgesehen — keine Antennen-Anbindung auf dem Carrier |
Auf diesem Carrier ist kein Mix-and-Match möglich — das jeweils andere Boot-Medium ist hardware-seitig nicht erreichbar:
- eMMC-Varianten booten immer vom eMMC. Der CM4 verbindet seinen MMC1-Bus intern fest mit dem eMMC; der externe microSD-Slot dieses Carriers ist physisch nicht angeschlossen.
- lite-Varianten booten immer vom microSD-Slot. Hier ist MMC1 auf den externen SD-Pfad geführt; ein eMMC ist nicht bestückt.
Die rpi-eeprom-config-Boot-Order ist zwar grundsätzlich auf CM4-Ebene konfigurierbar — auf diesem Carrier hat sie aber keinen Effekt, weil das alternative Boot-Medium physisch nicht erreichbar ist.
Steckverbinder
| Bezeichner | Typ | Funktion |
|---|---|---|
| J101 | 20-Pin (Hirose PCN10C-20S-2.54DS — weibliche Buchse, paart mit dem PCN10-20P-Stift-Header auf dem BusBoard) | Bus-Anschluss zum BusBoard. Versorgung (+5V/+12V/GND), USB-Host, I²C, USB_ID, nRPIBOOT. |
| J102 | 3-Pin Header (2.54 mm Raster) | UART-Debug. Pin 1 = GND, Pin 2 = RXD0, Pin 3 = TXD0. Pin-1-Lage im Silkscreen noch nicht markiert — siehe Issue #3. |
| J201, J202 | 2× DF40C-100DS-0.4V_51_ | CM4-Footprint (Board-to-Board, 0.4 mm Raster, 100 Pin pro Stecker). |
| J301 | HR911130A RJ45 | Gigabit Ethernet inkl. Magnetics + Link/Activity-LEDs. |
Bus-Stecker J101 — Lokale Pin-Numerierung
Achtung: Die Pin-Numerierung auf dem Carrier ist gespiegelt ggü. der Bus-Seite (BusBoard’s J201 Pin a1 mated mit CM4Carrier’s J101 Pin a10 etc.). Physikalisch passt’s; die Signale stimmen überein. Für die kanonische Bus-Pinbelegung siehe BusBoard.
Carrier-eigene Sicht auf J101:
| Pin | Net | Pin | Net |
|---|---|---|---|
| a1 | +12V | b1 | +12V |
| a2 | +12V | b2 | +12V |
| a3 | GND | b3 | GND |
| a4 | +5V | b4 | +5V |
| a5 | +5V | b5 | +5V |
| a6 | USB D+ | b6 | USB D- |
| a7 | NC | b7 | NC |
| a8 | I²C SDA | b8 | USB_ID |
| a9 | I²C SCL | b9 | nRPIBOOT |
| a10 | GND | b10 | GND |
Auf dem Carrier verbaute Komponenten
| Bauteil | Funktion |
|---|---|
| RT9742GGJ5 (U401) | Load-Switch / Strombegrenzer. Steuert die Versorgung der microSD-Karte (Eingang SD_PWR_ON vom CM4 → Ausgang gefilterte +3V3 zur SD-Karte). Erlaubt SD-Power-Cycle vom CM4. |
| SN74LV1T34DBV (U201) | Single-Buffer / Level-Shifter (3.3 V). Treibt die Power-LED aus dem CM4-Signal LED_nPWR heraus — entkoppelt von schwachen CM4-Boot-Pin-Treibstärken. |
| 2× TPD4EUSB30 (U301, U302) | ESD-Schutz für die vier Ethernet-MDI-Differential-Paare (ETH_TRD0/1/2/3_P/N) zwischen CM4-PHY und RJ45-Magnetics. Trotz des „USB30”-Namens ein generischer 4-Kanal-TVS, hier auf den Ethernet-Linien verschaltet. |
| D201 (Activity-LED) | Direkt vom CM4-Pin LED_nACTIVITY via Vorwiderstand (R201). Blinkt bei eMMC- oder SD-I/O. |
| D202 (Power-LED) | Über den SN74LV1T34-Buffer vom CM4-Pin LED_nPWR. Leuchtet sobald der CM4 läuft. |
Hinweis: Der Carrier hat keine eigenen I²C-Slaves. Der I²C-Bus wird unverändert zwischen CM4 und BusBoard durchgereicht; die einzigen I²C-Devices in der Remote Station sind die zwei INA226 auf dem PowerBoard (0x40 und 0x41).
Versorgung
| Rail | Quelle | Verbrauch |
|---|---|---|
| +5V | Bus-Stecker (vom PowerBoard) | < 1 A typ. (kein HDMI angeschlossen) |
| +3V3 | CM4-intern (am DF40C verfügbar) | für lokale Logik: SN74LV1T34, RT9742, RJ45-LEDs |
| +12V | Bus durchgeschleift | nicht direkt vom Carrier genutzt |
Debug-Header (J102)
3-Pin-Stiftleiste, 2.54 mm Raster:
| Pin | Signal | Beschreibung |
|---|---|---|
| 1 | GND | Masse-Referenz |
| 2 | RXD0 | UART RX vom CM4 (PC sendet hier hinein) |
| 3 | TXD0 | UART TX vom CM4 (PC empfängt hier) |
Pin-1-Lage im Silkscreen ist auf der aktuellen Revision NICHT markiert (Issue #3) — Schaltplan zu Rate ziehen oder die Adapter-Pinbelegung kurz mit einem Multimeter gegen GND verifizieren bevor angeschlossen wird.
Standard UART-Parameter des CM4-Bootloaders + Raspberry Pi OS: 115200 8N1 (sofern in config.txt / cmdline.txt nicht überschrieben).
rpiboot-Workflow (CM4 flashen)
Der CM4-Carrier hat keinen eigenen rpiboot-Jumper. Stattdessen sind die zwei dafür nötigen Pins (nRPIBOOT und USB_OTG_ID) auf den Bus-Stecker geführt (J101 b9 und J101 b8). Auf dem DeviceTester werden sie über den 4-Pin Flash-Header J202 manuell per Jumper gesetzt — beide Pins nebeneinander mit jeweils GND bzw. +5V als Nachbar:
nRPIBOOT→ GND (Pin 2 ↔ Pin 1): versetzt den CM4 nach Power-Up in den USB-Boot-Modus statt vom eMMC zu booten.USB_OTG_ID→ +5V (Pin 3 ↔ Pin 4): schaltet die USB-Schnittstelle in den Device-Mode (CM4 als USB-Gerät, PC als Host).
Ablauf:
- CM4 in den Carrier einsetzen, Carrier in den DeviceTester (Bus-Stecker
J101↔ DeviceTesterJ203) einsetzen. - Auf dem DeviceTester am 4-Pin-Header
J202beide Jumper setzen — Pin 1↔2 (nRPIBOOT auf GND) und Pin 3↔4 (USB_OTG_ID auf +5V). - DeviceTester per USB-C mit dem PC verbinden (
J201). rpibootauf dem PC starten — der CM4 erscheint als USB-Mass-Storage-Device (eMMC-Variante) bzw. erlaubt einen direkten Image-Schreib-Vorgang.- Nach Abschluss: Jumper am DeviceTester wieder abziehen, sonst bootet der Carrier beim nächsten Power-Up wieder in den rpiboot-Mode statt regulär.
⚠️ Funktioniert nur mit der eMMC-Variante des CM4 — eMMC-less / lite-CM4s booten ohnehin von SD und brauchen keinen Flash-Schritt; einfach SD-Karte mit dem Image bestücken.
Bringup
Nach Bestückung und mit eingesetztem CM4:
- Optisch: Power-LED
D202muss kurz nach Anlegen von +5V leuchten. Wenn nicht: prüfen ob CM4 korrekt sitzt und der eMMC-Variantenwahl entspricht (lite-Variante ohne SD-Karte hat nichts zum Booten). - Activity-LED:
D201blinkt unregelmäßig sobald der CM4 mit dem eMMC/SD redet. - Ethernet: RJ45 einstecken — beide LEDs am Stecker (Link gelb, Activity grün) sollten passend zur Netzwerklage aufleuchten.
- UART-Konsole: USB-TTL-Adapter (3.3 V Level!) an
J102(GND/RX/TX) anschließen, 115200 8N1 → CM4-Bootloader + Linux-Boot sichtbar. - I²C-Sanity: vom CM4
i2cdetect -y 1ausführen → die zwei INA226-Adressen0x40und0x41aus dem PowerBoard müssen ACK geben.
Verwandte Module
- BusBoard — nimmt den USB-Host des CM4 entgegen und verteilt ihn als 4-Port-Hub auf die Modulslots.
- PowerBoard — speist +5V/+12V via Bus ein; INA226 werden vom CM4 per I²C ausgelesen.
- DeviceTester — zieht
nRPIBOOTfür rpiboot-Mode auf GND und stellt USB-C zum Flash-PC bereit.